
{kind=link}
{kind=link}
The human hand, in its intricate design, offers a degree of manipulation that is unmatched in the animal kingdom. At the heart of this dexterity lies an exceptional feature: the multiple degrees of freedom (DOF). These degrees of freedom are what allow the hand to move and manipulate objects in such a precise, adaptive, and dynamic manner. In this article, we will delve into how the hand’s multiple degrees of freedom enhance manipulation, the role they play in human tasks, and how this understanding is shaping the development of robotics and prosthetics.
What Are Degrees of Freedom (DOF)?
Before exploring the enhancement of manipulation, it’s crucial to define what is meant by degrees of freedom. In the context of human anatomy, degrees of freedom refer to the number of independent movements a joint or structure can make. Each joint in the hand — from the wrist to the fingers — offers a unique set of movements that contribute to the hand’s overall flexibility and dexterity.
For instance:
- The wrist allows flexion and extension (up and down movements) and some limited rotation.
- The fingers, on the other hand, have more complex sets of movements. The thumb, being opposable, allows for rotation, flexion, extension, and abduction (moving away from the hand). The index and middle fingers contribute to fine motor skills and can make intricate movements, including flexion and extension at various joint levels.
When you consider the hand as a whole, it is the combination of movements across all these joints that provide the hand with multiple degrees of freedom — a range that allows for a virtually endless set of manipulations.
The Anatomy of a Highly Dexterous Hand
To understand the enhancement of manipulation through multiple degrees of freedom, we need to look at the hand’s anatomy.
1. Wrist: The Base of Control
The wrist is the foundation of hand movement. It offers the hand a small range of motion but plays an essential role in positioning the hand in space. The wrist can rotate and tilt, enabling the hand to reach different angles. These movements allow us to orient the hand to different tasks, such as turning a doorknob or typing on a keyboard. Despite its relatively limited range of motion compared to the fingers, the wrist still contributes substantially to the versatility of hand movements.
2. Fingers: The Precision Tools
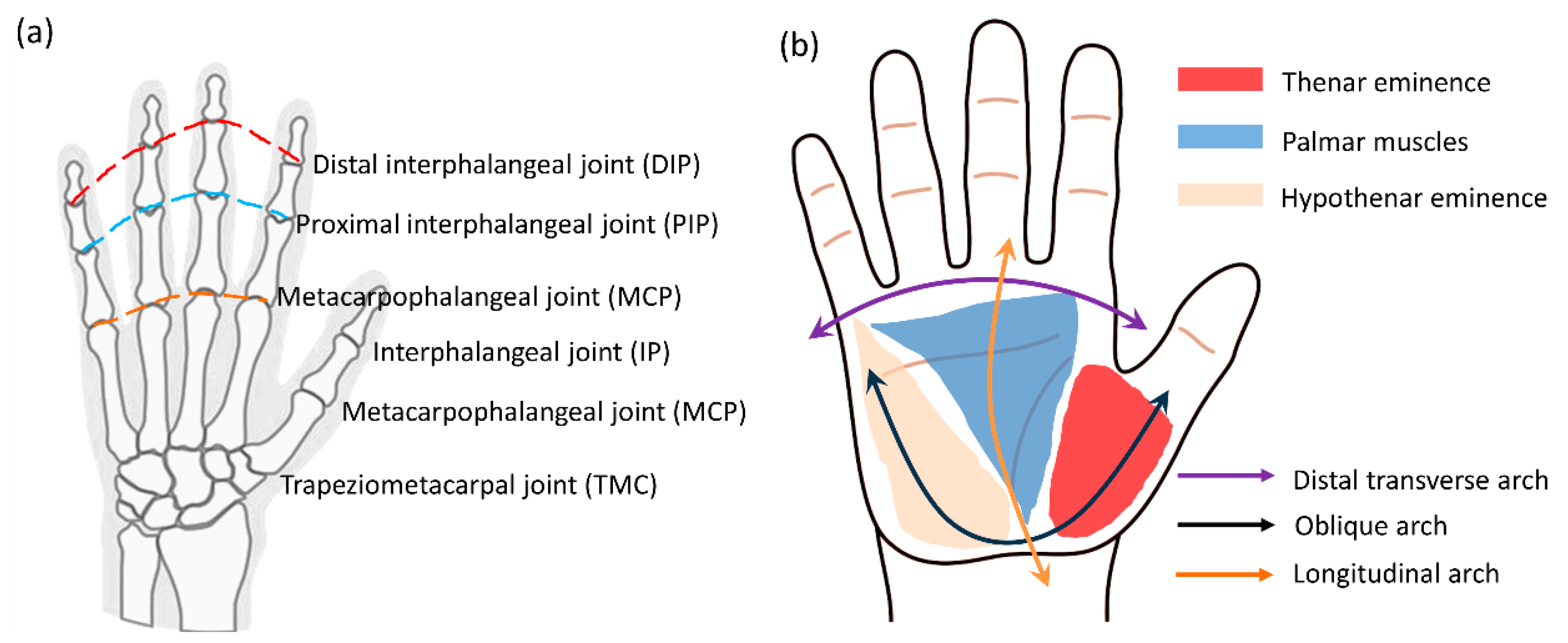
The fingers are the true architects of manipulation. A typical human hand can have anywhere from 20 to 24 degrees of freedom when considering individual joint movements. The thumb, for instance, is capable of complex movements that give it remarkable adaptability. The ability to touch the tip of the thumb to the tip of the fingers (opposition) is a unique feature that greatly enhances our grip strength and precision.
In total, the hand has four main fingers: the thumb, index, middle, ring, and pinky. Each finger has three joints (except the thumb, which has two), offering substantial flexibility. The combined range of motion from all these joints makes the hand exceptionally well-suited for manipulating a wide variety of objects.
3. Tendons and Muscles: The Force Behind Movement
The muscles and tendons in the hand work together to perform the precise movements required for dexterous manipulation. The tendons transmit the force from the muscles to the bones, while the muscles allow the joints to move in intricate ways. This cooperation between muscles and tendons allows for controlled movements with varying degrees of strength and precision.
How Multiple Degrees of Freedom Enhance Manipulation
The versatility of the hand is a direct result of the multiple degrees of freedom in its design. These degrees of freedom enhance manipulation in several ways:
1. Precision and Fine Motor Control
One of the main advantages of having multiple degrees of freedom is the ability to control small, precise movements. Fine motor skills — such as picking up a needle, threading it through fabric, or typing — rely heavily on these micro-adjustments. The multiple joints and independent motions of the fingers allow the hand to make small but controlled movements, which are essential for detailed tasks. Each finger and joint can move independently to fine-tune the grip and positioning of an object, enabling the human hand to manipulate things with extraordinary precision.
2. Adaptive Grips
The human hand can adopt a wide variety of grips, each suited to different types of objects. Whether it’s a precision grip (like holding a pencil) or a power grip (like holding a hammer), the hand’s ability to vary its shape and movement pattern is crucial. The thumb’s opposition to the fingers allows for grasping objects at different angles, while the other fingers can adjust their tension for a firmer or lighter grip. This adaptability is especially important in handling objects of varying shapes, sizes, and weights.
3. Multi-Tasking and Simultaneous Movements
Another key advantage of multiple degrees of freedom is the ability to perform simultaneous actions. The human hand can manipulate objects in complex ways, such as holding an object in one hand while simultaneously adjusting or moving another. This ability to handle multiple tasks at once comes from the independent motion of the fingers and joints. It is what allows humans to perform tasks like tying shoelaces, playing a musical instrument, or assembling intricate machinery, all of which require multiple actions in quick succession.
4. Sensation and Feedback
Hand manipulation is not just about moving the fingers and thumb in space. It is also about feeling what is being manipulated. The sensory feedback from the skin and joints allows for adjustments in real time. For instance, when gripping an object, the brain constantly processes tactile information from pressure sensors in the skin. If an object starts to slip or if a tighter grip is needed, the hand can adjust in an instant, making it capable of dealing with dynamic, ever-changing conditions.

5. Complex Coordination and Efficiency
Humans excel at performing tasks that require the coordination of multiple body parts. This includes the hand’s integration with the rest of the body to perform activities like eating, drawing, or playing sports. The hand’s degrees of freedom allow for this complex coordination by offering a range of motions that facilitate smooth, fluid transitions between different movements. This enables the hand to perform tasks efficiently while minimizing energy expenditure.
The Role of Multiple Degrees of Freedom in Robotics and Prosthetics
Understanding how multiple degrees of freedom in the human hand enhance manipulation is critical in the development of advanced robotics and prosthetics. The design of robotic hands and prosthetic devices often seeks to replicate the dexterity of the human hand by incorporating multiple degrees of freedom.
1. Robotic Hands
Robotics has made remarkable strides in recent years, and one of the primary challenges has been creating robotic hands that can replicate the flexibility and precision of human hands. Advanced robotic hands now incorporate multiple degrees of freedom in their design, mimicking the movements of human fingers and thumbs. These robots are equipped with sensors and actuators that enable them to grasp, hold, and manipulate objects with increasing skill and adaptability.
Many modern robotic hands have the ability to change grip patterns, much like the human hand, thanks to the use of multiple actuators and joint motors. With technologies like artificial tendons and actuators mimicking muscle actions, robots are increasingly able to replicate fine motor control. These advancements are particularly important in industries like surgery, where precision is critical.
2. Prosthetic Hands
For individuals who have lost a hand or fingers, prosthetics with multiple degrees of freedom offer an enhanced ability to interact with the environment. Early prosthetic devices were simple hooks or rigid appendages that lacked fine motor control. However, advancements in prosthetics now allow for more sophisticated designs that offer multiple degrees of freedom, giving users the ability to perform tasks that were previously impossible with traditional prosthetics.
Modern prosthetic hands feature individual motors and actuators for each finger and thumb, allowing users to manipulate objects more effectively. These prosthetics often include sensory feedback mechanisms that provide the user with tactile feedback, helping them adjust their grip and position based on real-time information.
Conclusion: The Power of Human Dexterity
The hand’s multiple degrees of freedom are the key to its unmatched dexterity and manipulation skills. From the ability to perform complex tasks like playing a musical instrument to more routine actions like eating or typing, the human hand’s design is a masterpiece of functional engineering. As technology advances, the replication of these movements in robotics and prosthetics will continue to improve, offering new possibilities in human-machine interaction and helping those with disabilities regain a degree of independence.
The next time you tie your shoes, play with a toy, or open a jar, take a moment to appreciate the intricate dance of muscles, tendons, and bones that makes such a wide range of actions possible. The power of the hand lies not just in its strength but in its exceptional adaptability, precision, and coordination — all thanks to its multiple degrees of freedom.