
{kind=link}
{kind=link}
In the rapidly evolving field of robotics, two humanoid robots have captured the imagination of engineers, technologists, and the broader public alike: Tesla Optimus and Figure 02. These machines are not merely mechanical arms bolted to factory floors or autonomous guided vehicles plowing orderly paths through warehouses. Instead, they are embodiments of cutting‑edge artificial intelligence fused with physical hardware designed to operate in environments that were previously the domain of human labor. The promise is audacious: humanoid robots that can learn, adapt, and improve over time within real industrial settings. But among these competing platforms — Tesla’s Optimus and the startup‑backed Figure 02 — which robot learns faster when placed on an actual factory floor?
In this comprehensive comparison we unpack both competitors along key dimensions of cognitive learning, training methodologies, AI architectures, real‑world deployment, task performance in industrial environments, and future prospects. Along the way we examine claims, hard data where available, and what engineers in the robotics community think about their learning paradigms. The goal is not simply to declare a winner, but to understand what “learning fast” truly means in the context of autonomous humanoid robot operation and what relevant tradeoffs exist between these two leading systems.
What It Means for a Robot to Learn in a Factory
The phrase “learning faster” in robotics is not mere jargon. In a factory, learning can mean several practical capabilities:
Adaptive Task Mastery: the ability to improve performance on repetitive or similar tasks through iterative experience.
Transfer Learning: the robot’s ability to generalize skills learned in one situation and apply them to another without explicit reprogramming.
Environmental Acclimation: adjusting behaviors when tasks are performed under new conditions — for example, a different assembly line layout, changes in lighting, or variable object placement.
Human Interaction: understanding instructions from human operators and integrating corrections into future actions.
Improvement Over Time: measurable reductions in error rates, task completion time, or the need for human intervention.
Not all robots tackle these objectives the same way. Some excel at structured tasks but falter under variability. Others are more flexible but slower to reach expert performance. For a meaningful comparison, we need to look at how Tesla Optimus and Figure 02 approach their learning strategies.

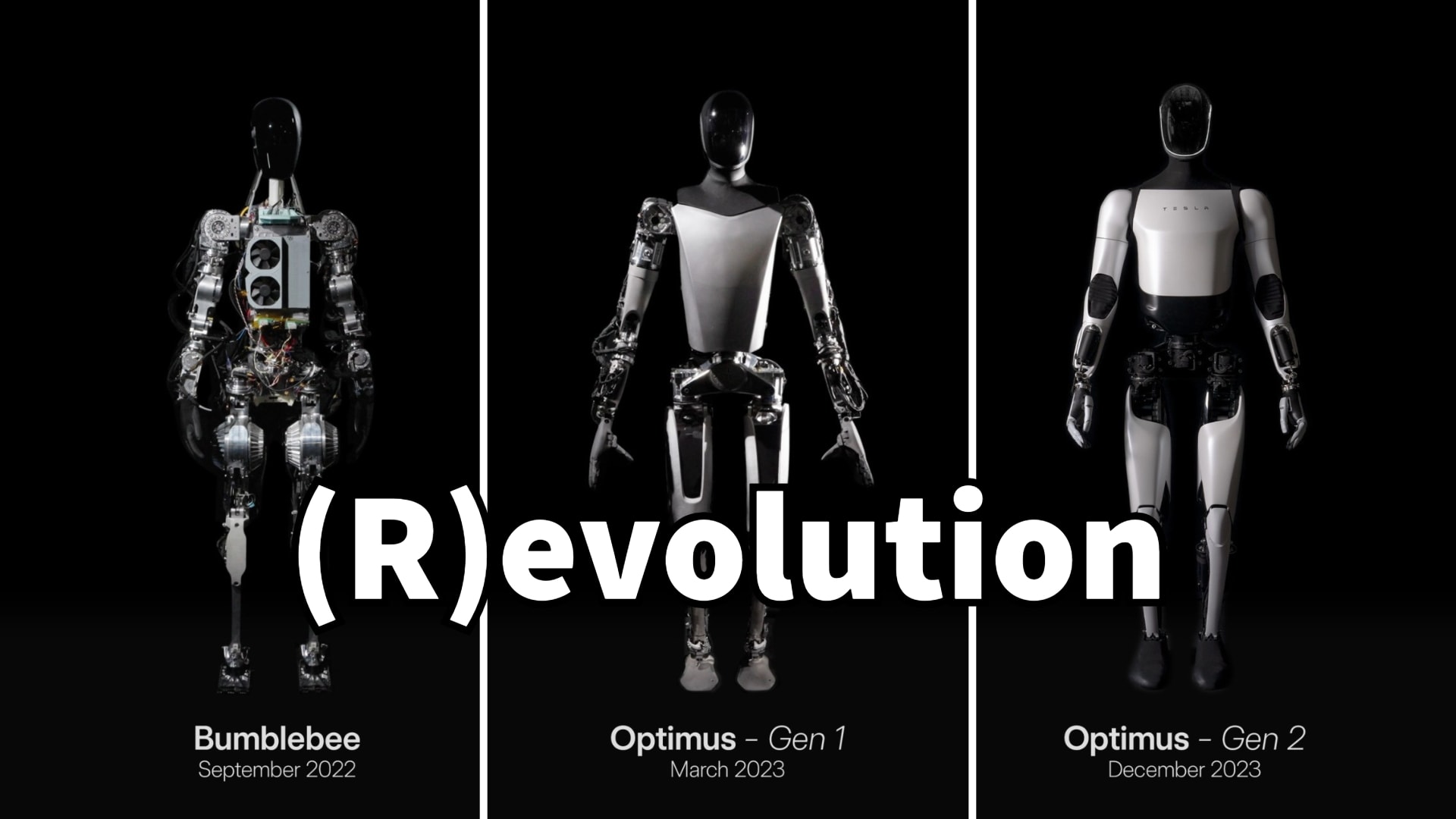
Tesla Optimus: Fleet‑Scale Learning Powered by Neural Networks
Tesla Optimus is a humanoid robot project spearheaded by Tesla, the same company responsible for one of the most advanced commercial autonomous driving systems. Tesla’s approach to robotic learning is informed heavily by its automotive AI experience. Instead of deterministic scripts, Optimus uses neural networks trained through a combination of demonstration, simulation, and data collected from real robotic operation. The goal is not to hard‑code every possible task, but to enable generalizable control policies that allow the robot to adapt as it operates.
One of the more publicized aspects of Optimus’s training ecosystem is the use of motion capture and human demonstration data. Tesla has hired individuals dressed in motion capture suits to perform actions that robots are expected to learn and replicate later. These demonstrations generate valuable movement data — from lifting objects to walking and manipulating tools — that trains the neural control systems within Optimus. According to reports, this human data collection is extensive and physically demanding for the personnel involved, pointing to the sheer volume of examples required to bootstrap robot learning. As one expert noted with respect to humanoid robotics training, millions of hours of data may be needed to achieve robust generalization of tasks, even with modern machine learning techniques.
Technically, Optimus uses Tesla’s custom computing hardware — including neural processing units adapted from Full Self‑Driving (FSD) systems — and a pure vision pipeline that interprets the surrounding environment using cameras, proprioceptive sensors, and tactile feedback. This vision‑based system allows the robot to map its surroundings, recognize relevant objects, and plan motion trajectories in real time. Because Tesla’s FSD AI has been trained on vast amounts of driving data, the theory is that such extensive neural network experience can jump‑start Optimus’s ability to perceive and adapt on the factory floor, where unpredictability is the norm rather than the exception.
Tesla’s learning strategy is not limited to one robot: it is fleet learning. Once a new task or policy is learned by one Optimus unit, the conceptual framework is that updates can be disseminated across all deployed robots via centralized data pipelines, enabling rapid scaling of acquired skills and collective improvement over time. This mirrors Tesla’s strategy with its vehicle fleet, where driving data is aggregated and used to refine neural models via over‑the‑air updates.
Yet Optimus’s progress has not been without challenges. Industry observers note that although demonstrations show promising behaviors — balancing, ambiguous object manipulation, or simple locomotion — the robot still relies on heavy human involvement via demonstration or teleoperation for many tasks. Engineering insiders have described lab training sessions where human trainers replicate repetitive actions hundreds of times to build the foundational data for Optimus’s learning algorithms. This highlights that while Optimus has powerful learning systems, it is still in a comparatively early stage of autonomous competency for complex tasks.
Figure 02: Contextual and Multimodal Learning
Figure 02 represents a different learning philosophy rooted in integrated AI systems that combine perception, reasoning, and action planning within a single software stack. Developed by the startup Figure, this robot emphasizes contextual understanding and sophisticated decision‑making bolstered by partnerships with AI research entities. According to published comparisons, Figure 02 uses an advanced onboard vision‑language model (VLM) that tightly couples visual perception with semantic interpretation and action selection. In practice, this can allow the robot to receive a natural language instruction, visually identify objects, interpret the environmental context, and execute appropriate task steps — all without external supervision.
Unlike Tesla’s focus on demonstrating actions via human data capture, Figure 02’s architecture incorporates a richer set of sensory inputs. The robot typically features multiple RGB cameras, inertial measurement units, force sensors, and integrated audio interfaces that allow it to interact with spoken commands. The VLM enables representation of tasks not just as sequences of motion but as goal‑oriented behaviors that can be parsed from spoken or written instructions. This approach is significantly more multimodal than the pure vision approach used by Optimus.
A concrete example of Figure 02’s capabilities comes from documented industrial pilots at automotive facilities. There, robots in the Figure series have been observed performing tasks like moving bins and boxes in real conveyor environments, handling material on shop floors, and navigating dynamic settings without constant human intervention. These real‑world tests indicate that Figure’s learning and operation stack is ready for deployment in scaled production scenarios — a key milestone for any robot aspiring to operate autonomously in complex industrial settings.
The learning methodology behind Figure 02 involves end‑to‑end neural models that combine visual perception, spatial reasoning, and action planning. Reinforcement learning, simulation environments, and imitation from human demonstrations are likely used to refine policies, but the distinguishing feature is the tight integration between semantic understanding and physical control loops. As such, Figure 02 can potentially develop robust, context‑aware strategies more rapidly than systems that depend primarily on raw motion data and incremental neural refinement.
Another important differentiator lies in the robot’s degree of freedom and manipulation capabilities. With fine‑manipulation hands and high‑dimensional joint reasoning, Figure 02 is optimized for tasks requiring precise object handling — a key part of factory workflows. Combined with its multimodal sensory array, this can accelerate the robot’s ability to learn and adapt to new task variants without massive retraining.
Comparing Learning Speed in Factory Settings
To answer which robot learns faster in practice, we need to consider what learning speed might entail in a factory environment. There are several axes to this evaluation:
Initial Task Acquisition: How quickly a robot can go from zero to task competency for a defined job.
Adaptation to Variability: How well a robot can handle changes in task parameters without retraining.
Generalization Across Tasks: Whether learning in one context transfers to other related tasks.
Human Instruction Interpretation: The ability to use verbal or symbolic instructions to accelerate learning.
On initial enrichment, Figure 02’s multimodal architecture and semantic reasoning capabilities lend it a measurable edge in acquiring task understanding swiftly. Its onboard vision‑language models allow it to contextualize requirements and plan actionable sequences without extensive demonstration or human teleoperation, which can otherwise be time‑consuming and resource‑intensive.
For adaptation, Tesla Optimus’s neural infrastructure is strong, especially once a policy exists within the fleet database. A shared learning pool means improvements discovered in one instance can populate the entire fleet, allowing agile responses to environmental changes at scale. However, this advantage is contingent on a sufficiently large deployed population and robust data integration mechanisms — neither of which are fully mature yet in commercial deployments.
In terms of generalization across tasks, both systems show promise. Optimus’s use of wide‑net neural representations can theoretically transfer movement principles from one task to another, while Figure 02’s semantic understanding allows high‑level abstractions of multiple task types. The difference lies in accessibility: Figure’s approach is immediately usable in contexts where human operators can simply provide verbal instructions, whereas Optimus may require retraining or demonstration to optimize new behaviors.
For human instruction interpretation, Figure 02’s embedded language interfaces and vision‑language action models clearly lead. Optimization of learning through interactive feedback and natural language goals reduces the iteration cycles needed for task mastery, particularly for non‑repetitive, variable work. Optimus’s systems are improving here, but as of 2025/2026, natural language interaction and conversational instruction have not been publicly demonstrated at the same level of maturity.
The Practical Verdict
In real factory settings today, Figure 02 appears to learn functional tasks faster in most practical scenarios. Its ability to integrate language, context, and perception into coherent action plans allows it to acquire and adapt new skills with fewer cycles of demonstration and feedback — a crucial advantage in dynamic industrial environments.
Tesla Optimus, by contrast, has a compelling strategy built on scale and data fusion. Once millions of units are deployed and sharing operational insights, Optimus may leverage fleet learning to surpass individual learning rate limitations. However, that stage is still unfolding, and current deployments are largely pilot programs that require substantial human‑generated training data.
This means that in the near term — particularly in early, operational factory environments — Figure 02’s methodology allows it to reach useful competency sooner than Optimus. Over the long term, Optimus’s centralized learning approach could yield dramatic collective improvements, especially when synchronized across large robot fleets and continually refined via neural model updates.
In short, Figure 02 currently learns faster in practical factory settings, while Optimus’s long‑term potential lies in its fleet‑scale learning architecture.