
{kind=link}
{kind=link}
In the world of robotics, there’s an ongoing battle between different mechanical designs that aim to replicate the dexterity of human hands. Two of the most popular contenders for this title are cable-driven hands and finger motors. Each design offers a distinct approach to mimicking the complexity and fluidity of human hand movements. But which one offers superior dexterity? To answer this, we must explore both systems’ underlying mechanisms, strengths, and limitations, while also considering their potential applications in the future.
Cable-Driven Hands: The Flexible, Lightweight Contender
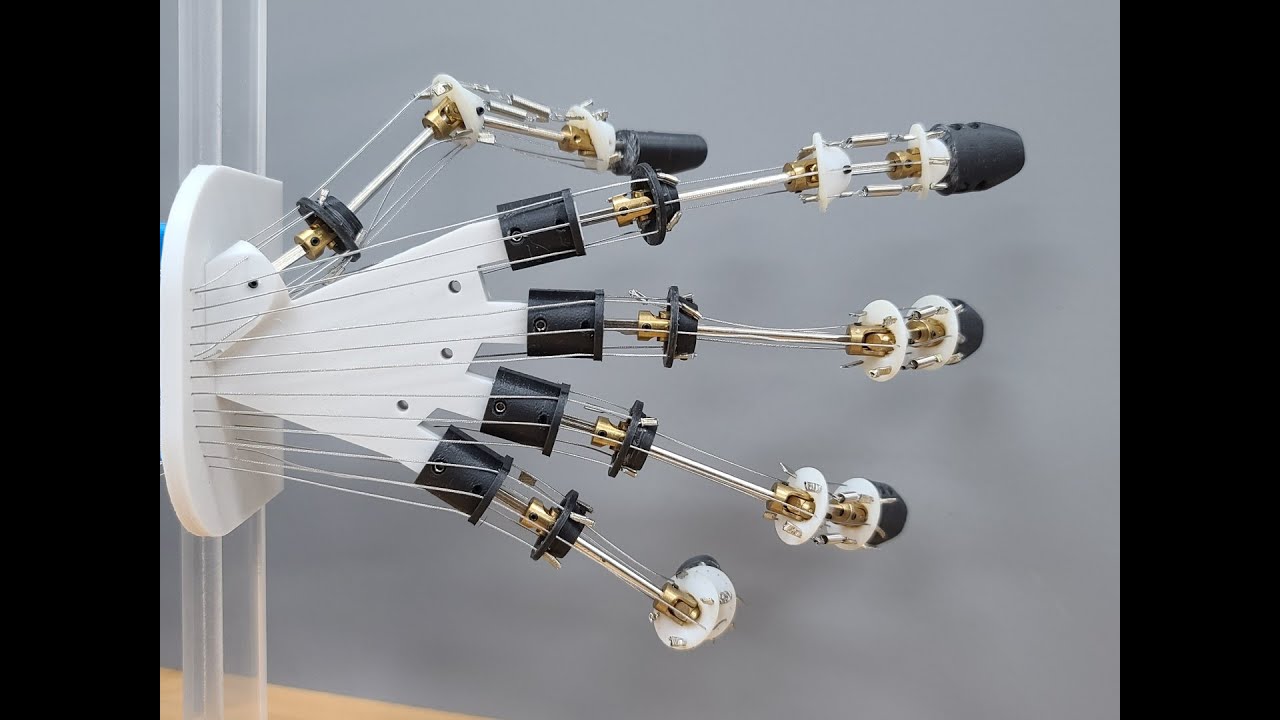
Cable-driven hands represent a fascinating solution to the challenge of replicating human hand dexterity in robotics. These systems use cables—often similar to tendons in the human body—that connect the various joints of a robotic hand. By pulling and releasing these cables, the hand can flex its fingers, grip objects, or perform intricate tasks with a high degree of flexibility.
The Mechanics Behind Cable-Driven Hands
At the core of cable-driven hands lies a simple yet effective system of cables and pulleys. Motors are used to control the tension of the cables, allowing precise movement of each finger joint. By manipulating the tension of the cables, the system can achieve complex hand gestures that mirror the nuanced motions of a human hand. The advantage of this design is its ability to create smooth, fluid movements that replicate the flexibility and dexterity of a human hand more naturally than some other robotic systems.
Advantages of Cable-Driven Hands
- Lightweight Design: One of the most significant benefits of cable-driven hands is their relatively low weight. Unlike finger motors, which can involve heavier components like motors and gears, cable-driven systems use lightweight materials for the majority of their structure. This makes them ideal for applications where weight is a critical factor, such as in wearable robotics or prosthetics.
- High Flexibility: Because the cables can be easily adjusted and controlled, cable-driven hands are highly adaptable. The system can be tuned to provide a wide range of motions, from a gentle grip to a firm grasp, mimicking human dexterity in a way that is hard to match with rigid designs.
- Scalability: Cable-driven systems can easily be scaled up or down, making them versatile for a range of tasks. Whether it’s a small prosthetic finger or a large industrial robot hand, the same principles apply, which makes cable-driven hands versatile across different industries.
- Cost-Effective: The simplicity of the cable-driven design can also make it more affordable to produce, particularly when compared to systems with more complex motorized components.
Limitations of Cable-Driven Hands
While cable-driven hands offer many advantages, they do have limitations. The primary challenge lies in the complexity of controlling multiple cables simultaneously. If one cable slips or breaks, it can affect the entire hand’s functionality. Additionally, the systems may struggle with tasks that require high precision or heavy-duty strength.

Finger Motors: Precision, Power, and Control
In contrast to the flexible and lightweight design of cable-driven hands, finger motors employ a more traditional approach to robot hand functionality. These systems use small motors attached directly to the finger joints to move them independently. The motors act as the actuators, providing the necessary force to achieve specific hand movements.
The Mechanics Behind Finger Motors
Finger motors operate using small electric motors, often DC or stepper motors, which are attached to individual finger segments. These motors are responsible for rotating the joints of the fingers, which allows the hand to grip, lift, or manipulate objects with a high degree of control. Advanced versions of these systems may also incorporate sensors that provide feedback on finger position, allowing for more precise control and adaptive responses to external forces.
Advantages of Finger Motors
- Precision and Control: One of the biggest advantages of finger motors is their ability to provide precise, repeatable control. Because each finger joint is controlled by an independent motor, the system can achieve a high level of precision, making it suitable for delicate tasks such as surgery, assembly work, or handling fragile objects.
- Power and Durability: Finger motors are often more powerful than cable-driven systems, allowing for more robust gripping and handling of heavy objects. This makes them particularly useful in industrial settings where a robot hand must handle large, heavy components.
- Simplicity in Control: With finger motors, the control system is relatively straightforward. Each motor can be controlled individually or in combination to create the desired hand gesture. This simplicity reduces the likelihood of system failure compared to more intricate cable-driven setups.
- Durability: Finger motors, when properly designed, are generally more robust and resistant to wear and tear. Cables can degrade over time, especially in systems with heavy usage, while motors, when maintained properly, tend to be more durable.
Limitations of Finger Motors
Despite their strengths, finger motors also come with some drawbacks. First, they are often heavier than cable-driven systems, due to the motors and gears required for operation. This additional weight can reduce the system’s overall dexterity and make it less suitable for applications where lightweight design is critical.
Another issue is that finger motors tend to be more complex and expensive to maintain. The high level of precision and force needed to control the motors often requires intricate gearing systems and sophisticated software, driving up the cost and complexity of the design.
Dexterity Comparison: Flexibility vs. Precision

When comparing the two systems in terms of dexterity, it’s essential to consider what “dexterity” really means. If we define dexterity as the ability to perform a wide range of nuanced movements, cable-driven hands have the edge. They can flex, stretch, and adapt their movements in ways that are more akin to human hand function. Their flexible design makes them ideal for tasks that require fine manipulation, such as grasping small objects or performing subtle gestures.
However, if we define dexterity in terms of control and power, finger motors have the advantage. The precision of finger motors allows for extremely accurate movements, making them more suitable for tasks where fine control is essential. In applications like robotic surgery or assembly line work, where precision and power are paramount, finger motors outperform cable-driven hands.
Ultimately, the choice between cable-driven hands and finger motors depends on the specific task at hand. Cable-driven hands excel in environments that demand flexibility, adaptability, and lightweight construction, while finger motors shine in scenarios requiring power, precision, and durability.
The Future of Robotic Hands
As robotics continue to evolve, we can expect to see hybrid systems that combine the best aspects of both cable-driven hands and finger motors. For instance, a robotic hand might use cable-driven mechanisms for flexible movement and incorporate finger motors for high-precision tasks. This convergence of technologies could unlock even greater levels of dexterity, enabling robots to handle a wider range of tasks with increased efficiency and accuracy.
Advances in material science, AI-driven control systems, and sensor technology will also play a crucial role in the development of more dexterous robotic hands. For instance, the use of soft robotics—a field that focuses on creating flexible, deformable materials—could allow for the development of robotic hands that are even more human-like in their dexterity.
Moreover, the growing interest in prosthetics has led to significant progress in both cable-driven and motorized systems. Researchers are continuously working on improving the functionality, comfort, and affordability of prosthetic hands, with the goal of providing users with a natural, intuitive experience. As the technology continues to advance, it’s likely that we will see a shift toward more adaptable, human-like robotic hands in both industrial and consumer applications.
Conclusion
In the battle between cable-driven hands and finger motors, neither system holds a clear-cut advantage in all aspects of dexterity. Cable-driven hands offer unparalleled flexibility and adaptability, making them ideal for applications that require smooth, natural movements. On the other hand, finger motors provide superior precision, control, and power, making them the preferred choice for tasks that demand strength and accuracy.
As robotics continues to evolve, the ideal solution may be a combination of both systems, leveraging the strengths of each to create robotic hands that can handle any task with ease and efficiency. With advancements in materials, control systems, and artificial intelligence, the future of robotic dexterity looks brighter than ever.