
{kind=link}
{kind=link}
Walking is something most of us take for granted — a fluid dance of balance, perception, planning, and muscle action. But get a robot to walk smoothly across shifting ground, adapt on the fly to uneven terrain, or keep a gait pattern synchronized with a human partner, and suddenly that simple stride becomes a rich scientific challenge. In the world of robotics, real‑time gait adaptation is one of the most crucial — and fascinating — problems researchers are tackling today.
In this article, we unfold the state of research behind real‑time gait adaptation in robots: what it is, why it matters, how scientists solve it, and where it’s heading. Whether you’re a student, engineer, or curious reader, you’ll find both technical depth and engaging explanations here.
Walking Isn’t Simple — But Robots Must Learn It
Human gait is a complex sequence of coordinated motions involving sensory feedback, dynamic balance, timing, and adaptability. A robot attempting even a basic walk must replicate that interplay using sensors, mathematics, physics, and control systems. Real‑time gait adaptation means the robot adjusts its walking pattern instantly based on new data — not pre‑computed routines.
This capability is vital for:
- Humanoid robots navigating real‑world environments.
- Legged search & rescue robots traversing rubble and debris.
- Exoskeletons assisting people with movement impairments.
- Wearable assistive devices adapting to individual gait characteristics.
In simple terms, real‑time gait adaptation enables a robot not just to walk, but to walk intelligently. That means responding dynamically to uneven ground, variable speed, obstacles, and unexpected perturbations — just as humans do instinctively.
The Core of Real‑Time Gait Adaptation: Sensing, Perception, and Control
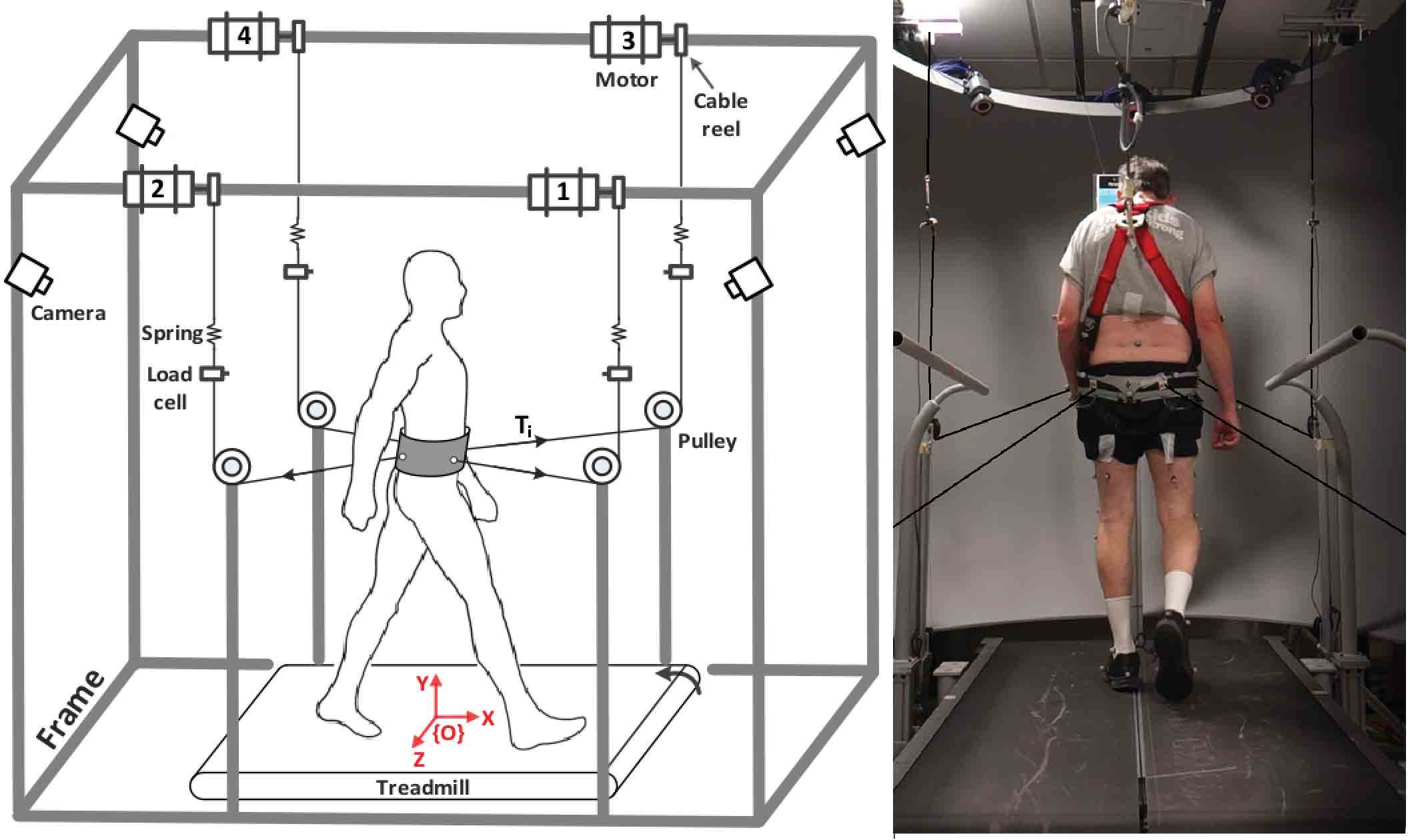
Adaptation starts with sensing. Robots rely on a suite of sensors — IMUs (inertial measurement units), force sensors in feet, joint encoders, vision systems, and sometimes even depth cameras — to perceive their motion and the environment.
Once raw data arrives, the robot needs to interpret where it is within a gait cycle (what phase of stepping it’s currently in) and what the ground beneath it looks like.
Gait Phase Variable Estimation
One approach to understanding walking cycles is real‑time gait phase estimation. This method uses kinematic signals (often joint angles measured by IMUs) to calculate continuous gait phase — from heel strike to toe‑off and back again — as a continuous variable that the controller can use to adapt motion timing and force in near real time. Real‑time frameworks have been developed that adapt to individual gait features and walking speeds without offline tuning, enhancing personalized control of wearable robots.
Bioinspired and Event‑Triggered Methods
Researchers have also drawn inspiration from biology. For example, a bioinspired adaptive oscillator model — originally used to explain synchronous flashing in fireflies — has been applied to gait synchronization between humans and robots. By detecting key gait events (like foot contact) and feeding them into adaptive oscillators, robots can generate synchronized trajectories that adapt to changes in human gait, including abnormal patterns.
Terrain Adaptation via Real‑Time Reconstruction
Newer research even combines perception and control in a unified AI framework. For full‑size humanoid robots, scientists use downward‑looking depth cameras to reconstruct terrain geometry in real time. These dense height maps, processed at the control loop’s frequency, are integrated with proprioceptive data so that gait timing and upper‑body posture adapt together to local terrain — a huge leap toward reliable locomotion over complex environments.
Algorithms That Power Real‑Time Adaptation
At the heart of adaptive gait lies mathematics and computational intelligence. A wide range of methods are in active research.
Optimization Methods and Minimal Trajectories
Some strategies frame the robot’s gait planning as an optimization problem. For instance, gait planners for exoskeletons optimize joint space trajectories to minimize angular accelerations while respecting motor speed limits — producing flexible, real‑time executable patterns that change with conditions like ground health and user intent.
In hexapod robots (six‑legged), gait planning can be framed as minimizing joint displacements subject to terrain constraints. These optimized gaits have been demonstrated to improve adaptability (like better performance on slopes and steps) while fulfilling essential computations within milliseconds — a hallmark of real‑time control.
Reinforcement Learning & Data‑Driven Policies
Beyond classical optimization, reinforcement learning (RL) and data‑driven controllers are exploding in importance. These algorithms simulate thousands of walking scenarios in a physics engine and let the robot learn policies that generalize across terrains and disturbances. One well‑known approach called Rapid Motor Adaptation (RMA) enables quadruped robots to adjust in fractions of a second to changing terrains, payloads, and wear‑and‑tear — without manually designed trajectories.
Another example uses deep learning (like temporal convolution and transformer layers) to estimate gait phase with high accuracy from IMU signals, empowering exoskeletons and wearable robots to adapt gait cycles even during terrain transitions.
AI Hybrid Controllers
AI systems are also combined with classic control. For instance, adaptive frequency oscillators merged with neural networks (e.g., back propagation networks) can improve gait intention recognition and synchronized control in exoskeletons, which is crucial for assisting users with neurological impairments.
Sensors and Feedback Loops: The Robot’s Nervous System
A robot’s sensory inputs are analogous to a human’s nervous system. Without reliable sensor fusion and feedback, adaptation becomes brittle.
- IMUs and joint encoders provide instantaneous movement data.
- Foot contact sensors reveal when and how the robot’s stance phase changes.
- Force sensors detect ground reaction forces essential for balance.
- Vision and LiDAR systems preview upcoming terrain irregularities.
By combining these inputs through sensor fusion algorithms, robots build an evolving model of their stance, motion, and environment. Feedback control loops then use this model to update motor commands in real time, adjusting step length, cadence, joint torques, and balance strategies.
Some research even aims for reduced sensor sets, using only thigh‑mounted IMUs to infer gait phase and adapt control — a boon for wearable devices where simplicity is valuable.
Application Domains: Where Gait Adaptation Matters Most
Real‑time gait adaptation isn’t just a laboratory curiosity — it powers real advances in:
1. Rehabilitation and Assistive Robotics
Adaptive gait control enables exoskeletons and wearable robots to provide tailored walking support. Gait intention recognition and real‑time adaptation ensure that assistance is synchronized with the wearer’s motion, improving both effectiveness and safety.
Clinical trials of motion‑prediction enabled hip wearable exoskeletons show significant improvements in gait recovery and balance in subacute stroke patients — supporting the practical impact of real‑time adaptive control in human health applications.
2. Humanoid Robots in Dynamic Environments
Humanoid robots navigating uneven terrain demand fast adaptation — whether climbing stairs, stepping across gaps, or adjusting foot placement to maintain balance. With perceptive locomotion frameworks, these robots can adapt gait timing and posture on the fly.
3. Search & Rescue and Field Robotics
Quadruped and multi‑leg robots deployed in disaster scenarios must adapt gait parameters to rubble, slopes, and debris. Real‑time adaptation enhances robustness and mission success — far beyond what pre‑planned trajectories alone can achieve.
The Challenges Ahead
Despite rapid progress, several open challenges remain:
- Computational Limits: Real‑time adaptation demands extremely fast computation, especially for high‑DOF humanoids. Balancing complexity with responsiveness is a continuing research focus.
- Generalization: Controllers must adapt to terrains and situations not seen in training. Reinforcement learning and hybrid models are promising but not yet perfect.
- Human‑Robot Interaction: Synchronizing gait with a human wearer or partner — particularly someone with gait abnormalities — requires robust intention recognition and safety‑aware adaptation.
- Energy Efficiency: Adaptive gait must also be energy efficient. Sudden changes in gait parameters can destabilize a robot or expend excess power.
What’s Next: Toward Truly Autonomous Locomotion
The frontier of real‑time gait adaptation in robots lies at the intersection of AI, control theory, biomechanics, and perception:
- Deep reinforcement learning continues to push adaptive locomotion closer to human levels of fluidity.
- Neuromorphic sensing and bioinspired control architectures promise even faster and more efficient adaptation.
- Shared autonomy between humans and robots will unlock new assistive and augmentative possibilities.
- Sim‑to‑real transfer techniques will reduce reliance on physical trials, speeding innovation.
Soon, the line between human and robotic gait adaptability may blur — with robots learning and refining walk patterns as seamlessly as a toddler learns to walk.