
{kind=link}
{kind=link}
Introduction
Humanoid robots were once the stuff of science fiction—clunky metal figures in Hollywood films, awkwardly mimicking human motion with limited grace and precision. Fast forward to today, and we are witnessing a dramatic transformation: mainstream research labs, ambitious startups, and global tech giants are racing to teach these machines how to perceive, think, and act like humans. Central to this evolution is the rise of hybrid models—learning systems that combine multiple paradigms, blending analytical control, physics‑based models, machine learning, symbolic reasoning, and data‑driven neural networks into cohesive frameworks.
In careful contrast to singular approaches such as purely model‑based control or wholly data‑driven deep learning, hybrid models represent a convergence of strengths: physical correctness, adaptability, generalizability, and efficiency. As humanoid robots tackle increasingly complex environments and tasks—walking on uneven terrain, interacting with dynamic humans, or manipulating objects with human‑like dexterity—the limitations of traditional approaches become more apparent, and hybrid learning is filling the gap. This article explores why hybrid models have surged in popularity, what they offer, how they are transforming humanoid learning, and where the field is heading next.
The Challenge of Humanoid Learning
Humanoid learning sits at the intersection of classical robotics and artificial intelligence. Unlike wheeled robots operating in structured environments, humanoids must reason about dynamic, unpredictable settings using high‑dimensional sensorimotor data. Their control systems must manage hundreds of degrees of freedom while maintaining balance, planning motion, responding to obstacles, and coordinating sensory perception, decision making, and actuation in real time.
Traditional model‑based control relies on accurate mathematical descriptions of robotics dynamics—equations that can predict how a humanoid’s body will respond to forces and torques. These models offer interpretability and safety guarantees, but in practice they struggle with uncertainties, complex physics, and environmental unpredictability. At the same time, purely data‑driven machine learning systems, especially deep learning and reinforcement learning (RL), excel at pattern recognition and end‑to‑end policy learning from large datasets, but they often demand enormous amounts of training data or simulation time, and can lack guarantees about safe and physically plausible behavior.
The gap between these paradigms—between reasoned physics and empirical learning—is where hybrid models shine. By integrating both domains, hybrid models reduce the weaknesses of each and retain their strengths. In effect, they allow humanoid systems to learn faster, adapt more robustly, and behave more reliably across a variety of tasks.
What Are Hybrid Models?
“Hybrid” in humanoid learning generally refers to computational architectures that combine multiple frameworks into a unified system. The exact components vary, but the key idea is consistent: blend analytical or physics‑based modeling with learned representations and data‑driven strategies. Common hybrid components include:
1. Model‑Based Foundations + Learning Adjustments
Model‑based parts provide a reliable physical understanding of robot kinematics and dynamics, while learned adjustments correct for real‑world discrepancies or optimize behavior using data. For example, combining a physics model with a neural network controller can improve tracking accuracy or compensate for unmodeled effects in the real world.
2. Model‑Free Reinforcement Learning + Analytical Controllers
Reinforcement learning excels at discovering strategies through interaction, but can be sample‑inefficient. When paired with analytical controllers such as linear quadratic regulators (LQR) or feedback stabilization, RL components can focus on high‑level policy adaptation, while the low‑level controller maintains stability and safety.

3. Multimodal Learning + Control Systems
Modern hybrid systems often layer language, vision, and action into unified architectures that can extract semantic understanding from multi‑sensory inputs and translate it into motion policies. The recently introduced vision‑language‑action (VLA) models epitomize this trend by integrating perception, reasoning, and control end‑to‑end.
4. Physics‑Infused Deep Neural Networks
A hybrid model can explicitly embed physical constraints or biomechanical principles into neural networks so that outputs remain consistent with real‑world motion laws. This approach not only improves realism and safety but also reduces data requirements during training.
5. Hierarchical Learning Systems
Some hybrid systems adopt a hierarchical structure where high‑level planners manage abstract goals or tasks, and low‑level controllers deal with precise joint control or reflexive responses, blending symbolic planning with continuous control.
These configurations allow designers to trade off between speed of adaptation, physical plausibility, and generalization.
Why Are Hybrid Models Gaining Traction?
The growing popularity of hybrid models in humanoid learning is not accidental but driven by concrete advantages that align with both research goals and practical demands.
1. Sample Efficiency and Faster Learning
Pure reinforcement learning often requires millions of interactions—either in simulation or reality—before achieving competent behavior. Hybrid systems can dramatically improve sample efficiency by leveraging existing physics models to bootstrap learning and focus data‑driven components on residual errors or task specifics. For example, a hybrid controller can use analytical dynamics to initialize policies and then refine them with data‑driven tweaks, significantly reducing training demand.
2. Improved Robustness and Stability
By retaining model‑based elements, hybrid systems benefit from physical grounding and can ensure that learned behaviors remain stable and safe when deployed beyond the training distribution. This is especially important for bipedal locomotion and balancing tasks, which are inherently unstable and sensitive to noise or perturbations.
3. Generalization to Unseen Tasks
Purely learned policies tend to overfit to the environments and tasks they are trained on, making transferring skills difficult. Hybrid models can embed higher‑order physical priors or shared controllers that generalize better across contexts, allowing one learned policy to adapt to multiple activities or environments.
4. Safety, Interpretability, and Compliance
Regulatory and safety considerations demand systems that behave predictably and can be explained when they fail. Hybrid models with explicit analytic components can offer mechanistic interpretability and safety guarantees that opaque end‑to‑end neural networks typically cannot provide. This is valuable in human–robot collaboration and clinical deployment settings, where unpredictable behaviors can have serious consequences.
5. Bridging Simulation and Reality
One of the enduring challenges in robotics is the “reality gap” between simulation and real world. Hybrid models help bridge this gap by learning residuals between simulated and real physics and compensating for systematic discrepancies, enabling more seamless transfer from simulation to physical robots.
6. Multimodal Perception and Reasoning
Recent advances in multimodal models, especially those that integrate vision and language with action, illustrate the power of hybrid design. Robots equipped with such architectures can understand complex instructions, contextualize tasks in semantic terms, and execute actions that align with human expectations—something neither pure symbolic logic nor pure neural networks can accomplish alone.
Real‑World Impact: Case Studies and Examples
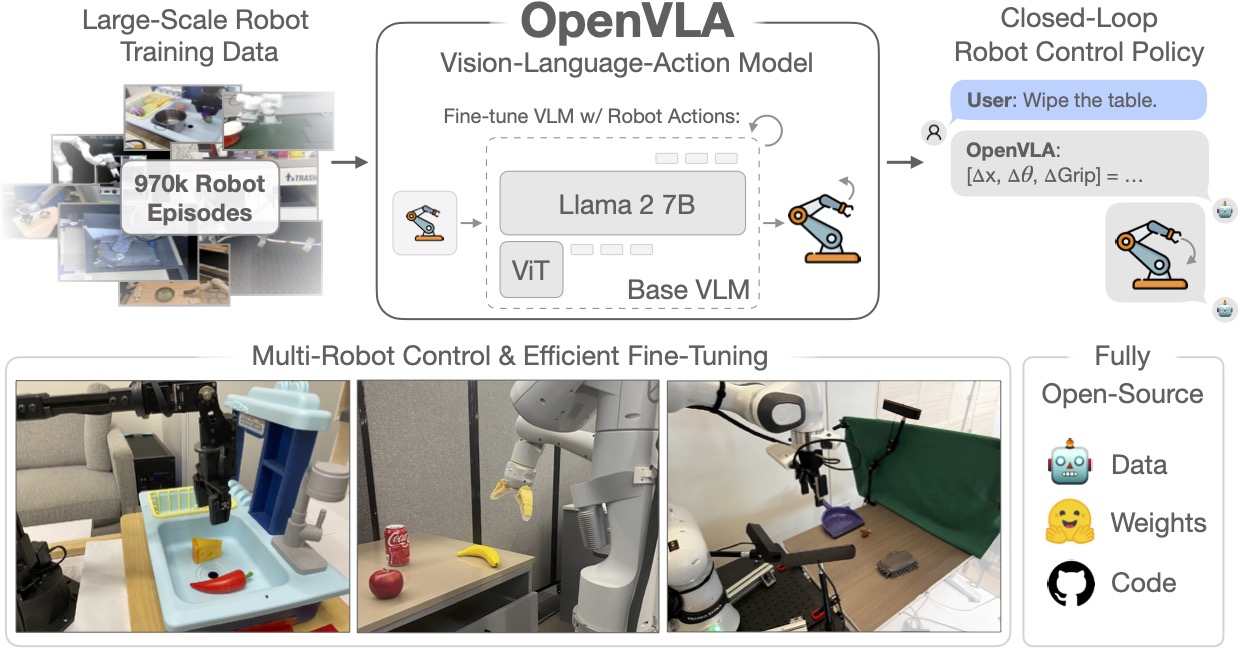
Vision‑Language‑Action Models
2025 introduced a new generation of multimodal architectures where perception and decision making are fused with control. Vision‑language‑action (VLA) models let robots interpret instructions (“pick up the red cup next to the green vase”) and convert them into sequences of motor commands without separate modules for perception and planning. These systems illustrate hybrid design at scale: combining large language models (LLMs), visual encoders, and motion decoders into a unified pipeline that generalizes across tasks.
Hybrid Controllers for Balance and Walking
In bipedal locomotion research, hybrid learning‑control approaches have shown better attempts at human‑like walking and run‑to‑walk transitions. These strategies blend physics‑based inverse dynamics with reinforcement learning policies that tune foot placement and balance strategies in real time.
Physics + Deep Learning in Prediction
Hybrid models that infuse physics constraints into deep learning architectures have significantly improved joint state prediction and motion synthesis tasks, yielding better predictions of human upper‑limb motion in collaborative tasks.
Reduced Data Bottlenecks
By using hybrid frameworks that encode higher‑level abstractions into sensors and internal models, researchers have achieved cross‑embodiment behavior transfer, where skills learned for one humanoid can be adapted to another with minimal retraining.
Theoretical Foundations and Broader Trends
Hybrid models are not a niche innovation—they reflect a broader trend in AI and robotics towards interdisciplinary integration. In AI research, neuro‑symbolic approaches combine neural networks with symbolic reasoning to improve general cognition; in control theory, adaptive collaborative control merges human decision making with robotic autonomy. These developments echo the same principle: leverage the best of multiple paradigms to achieve robust, general, and adaptive intelligence.
Challenges and the Road Ahead
While hybrid models offer significant advantages, they are not without challenges. Integrating diverse computational frameworks increases system complexity, both in design and maintenance. Hybrid architectures also demand careful calibration—melding physics with learning requires precise balancing to avoid conflicting objectives or poor convergence.
Moreover, explainability remains an open problem: although hybrid models can improve interpretability by integrating analytical components, their data‑driven portions can still behave like black boxes under certain conditions. Ensuring that these systems remain transparent and accountable as they operate in real human environments will be essential for widespread adoption.
Lastly, the next frontier lies in scaling hybrid models for real‑world autonomy. Generalist humanoid agents that robustly operate in unpredictable environments—homes, hospitals, factories—will require hybrid learning that is scalable, safe, and flexible enough to handle the diversity of human activity.
Conclusion
Hybrid models are rapidly becoming the dominant paradigm in humanoid learning because they combine the best aspects of traditional robotics and modern machine learning. They achieve faster learning, better generalization, enhanced safety, and richer multimodal understanding. As research and engineering progress, hybrid approaches will continue to shape the next generation of humanoid robots—machines that can collaborate with humans, adapt to new tasks, and interact with the world in ways that feel natural, reliable, and efficient.