
{kind=link}
{kind=link}
Humanoid robots are no longer the stuff of sci‑fi fantasy. From factory floors and research labs to delivery services and even medical settings, robots shaped like humans are becoming increasingly capable, autonomous, and versatile. Yet, one of the hardest skills for machines to master isn’t locomotion or even vision — it’s touch. To humans, touch feels effortless: we brush fingers over a surface and immediately know if it’s soft, rough, smooth, hot or cold. Replicating that simple sensation in a robot requires intricate engineering, sophisticated sensors, and clever computational networks.
This article dives deep into the heart of this challenge. It unpacks what tactile sensor networks are, how they enable robots to “feel”, and why this technological leap is as important as sight or sound in building truly intelligent machines.
1. Touch: The Missing Sense in Robotics
Humans rely heavily on touch. We adjust grip strength without thinking, detect hidden objects in a bag, and interpret texture, hardness, and shape at lightning speed. In robotics, visual perception — through cameras and lidar — took early focus because it’s easier to digitize optical data than replicate human skin. But relying solely on sight limits robots in real‑world interaction, especially in cluttered, variable environments where vision can fail (e.g., darkness, fog, reflections, or occlusions).
Touch sensing closes that gap. It lets robots determine force, shape, texture, and object orientation directly through physical contact — essential for delicate manipulation, safe human interaction, and adaptive behavior. Without tactile feedback, even the most advanced robot hands can be clumsy, unaware, or destructive.
2. What Are Tactile Sensor Networks?
At its core, a tactile sensor network is a distributed array of sensors embedded in or on the surface of a robot — typically on fingers, palms, limbs, or full body surfaces. These sensors measure physical interactions: pressure, force, vibration, shear, and sometimes temperature or proximity. Individually, each sensor element is simple; collectively, they create a sensory map — a robotic “skin”.
Unlike a single point sensor, a network collects spatial patterns of touch. This lets a robot determine not just whether it’s touching something, but where, how much, and in what direction — a profound leap in situational awareness.
There are two broad categories of tactile integration:
- Local networks on specific parts (e.g., a fingertip array).
- Global networks spanning larger body areas, enabling whole‑body contact awareness.
Each sensor element feeds data into central processing systems that interpret patterns, just as biological nerves transmit signals to the brain.
3. How Tactile Sensors “Feel” Physical Contact
The real magic happens in how sensors convert mechanical phenomena into electrical signals. Engineers draw on multiple physical effects:
❖ Piezoresistive Effects
Certain materials change electrical resistance when deformed. By layering these materials under a sensor skin, a small force causes measurable resistance shifts that map to contact pressure or force. This approach provides a continuous, gradated sense of touch, crucial for delicate object manipulation.
❖ Capacitive Sensors
Capacitive tactile sensors register changes in electrical capacitance — typically between two plates — as surfaces deform. When an object presses against a sensor array, the distances between sensing plates change, shifting capacitance values. These systems can be highly sensitive and support dense arrays with good spatial resolution.

❖ Optical and Vision‑Based Tactile Sensing
Some advanced tactile arrays use tiny cameras or light beams beneath a compliant surface. Deformations alter light patterns, which are tracked and interpreted in real time. This method can capture detailed texture and subtle force patterns that electrical methods may miss.
❖ Triboelectric & Magnetoelastic Systems
Emerging modalities combine triboelectric (contact electrification) or magnetoelastic sensors to pick up minute pressure and motion cues. These sensors are often highly responsive and robust under varying conditions.
❖ Temperature & Thermal Feedback
Although not strictly tactile, integrating thermal sensors allows robots to assess surface temperature simultaneously with touch — a capability valuable in human‑robot interaction and safety.
Each sensor type has trade‑offs in sensitivity, durability, cost, and complexity. In practice, modern tactile networks often combine modalities to glean richer tactile data.
4. Mimicking Human Tactile Physiology
The human sense of touch isn’t uniform — different mechanoreceptors in our skin detect distinct qualities like light brush, pressure, vibration, or texture. Inspired by biology, researchers design artificial tactile networks with similar sensory diversity, often structuring sensor layers to imitate this layered human tactile response.
For example, slow‑adapting and fast‑adapting artificial channels mimic how our own nerves respond to static and dynamic touch, improving texture recognition and slip detection.
Some tactile sensor designs even emulate the structural complexity of skin by incorporating multiple sensing layers, each optimized for a specific force dimension — normal, shear, vibration — enabling robots to differentiate between push and slide with higher fidelity.
5. The Role of Sensor Networks in Robotic Perception and Control
Raw sensory data isn’t useful on its own. Tactile networks must connect to processing systems that interpret and respond to signals intelligently. This sensory data flows through several stages:
Data Acquisition
Every sensor unit continually feeds voltage or digital readings to a controller.
Signal Processing
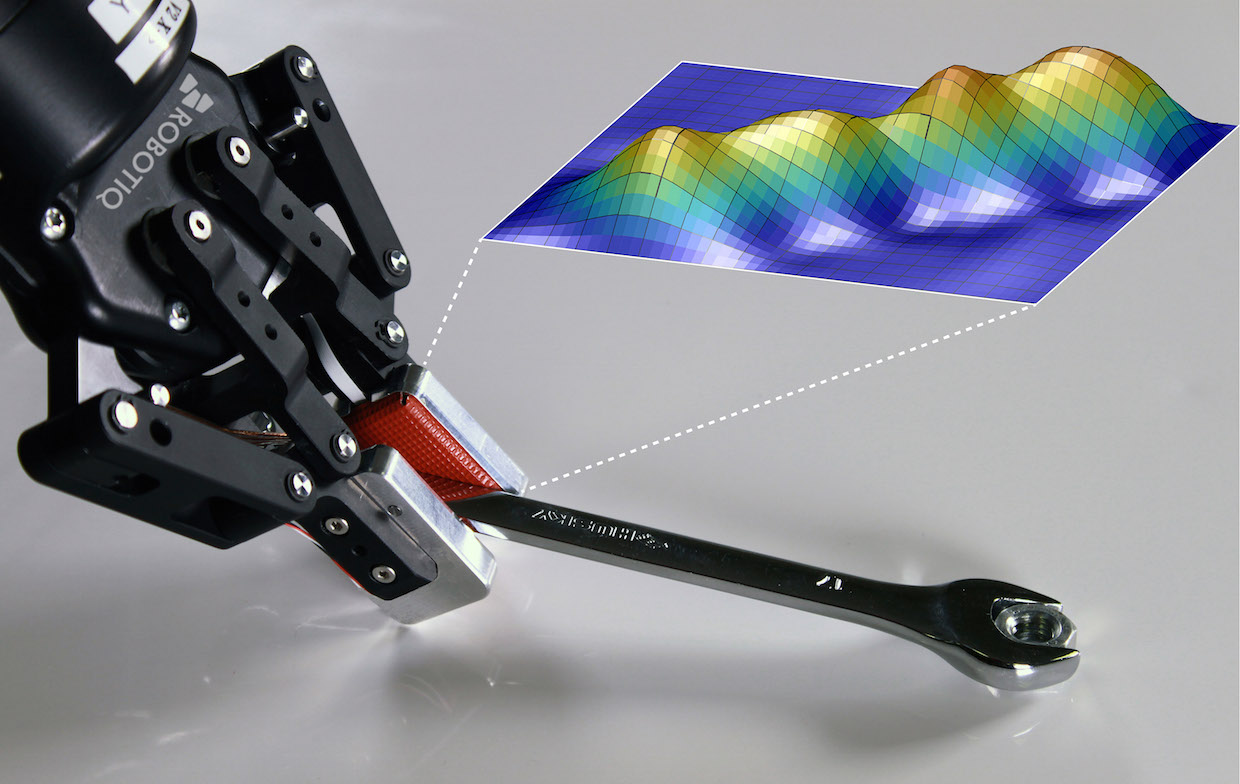
Filter noise, standardize inputs, and interpolate spatial patterns. Advanced sensor skins can produce “tactile images” — high‑resolution pressure maps that resemble digital pictures of touch patterns.
Integration with Other Modalities
Often, tactile sensing is fused with vision or proprioception (joint position feedback) to build a comprehensive perception model. For instance, visual data helps plan initial approach, and tactile data refines grip adjustments in real time.
Machine Learning Interpretation
Deep neural networks and classical pattern recognition are increasingly vital. Models trained on tactile maps can recognize object classes, predict texture, or adapt control strategies dynamically based on real‑time feedback.
For example, tactile object recognition systems can train convolutional deep networks on patches of tactile data to classify objects with high accuracy.
6. How Robots Use Touch in Real‑World Tasks

Humanoid robots equipped with tactile networks gain remarkable abilities:
Adaptive Grasping
Without tactile feedback, robots apply a fixed grip force that may be either too loose or too strong. With touch data, robots can increase grip incrementally until sensors detect slip, then adjust force accordingly.
Shape and Texture Recognition
Tactile maps — akin to a human finger running over a surface — let robots identify material properties or predict how an object will behave when manipulated.
Slip Detection and Reactive Control
When an object begins to slip, tactile feedback detects slight changes in force patterns. The robot automatically contracts or adjusts finger orientation to prevent dropping — a core function in dextrous manipulation.
Safety in Human Interaction
Tactile skins across arms and torsos let robots detect unexpected human contact. Sudden pressure triggers a safety stop or gentle response — essential in collaborative robotics where humans and robots share space.
Exploration without Vision
In environments where cameras fail — such as in smoke, underwater, or within confined machinery — robots can rely entirely on touch to explore and map surfaces.
7. Challenges in Building Real “Feeling” Robots
Despite dramatic progress, tactile sensing still faces hurdles:
Miniaturization and Integration
Dense sensor coverage, especially over curved or flexible surfaces (like an artificial palm), requires tiny, robust elements and intricate wiring.
Data Deluge
High‑resolution tactile skins generate huge data streams. Processing in real time demands efficient algorithms and hardware.
Material Durability
Sensor skins must withstand wear, impacts, abrasion, and environmental factors without degrading performance.
Calibration and Consistency
Sensors can drift over time. Ensuring consistent sensitivity across millions of units is a nontrivial engineering task.
8. The Future of Touch in Robotics
Looking ahead, tactile networks will become more elastic, self‑healing, self‑powered, and multi‑functional. Researchers are exploring stretchable, soft tactile skins that repair minor damage and integrate seamlessly with robot structures.
Machine learning models will grow more adept at interpreting high‑dimensional tactile data, enabling robots to perceive subtle nuances in texture and intent.
In the long term, touch will merge with other sensory modalities and cognitive models to produce robots that interact intuitively with humans and the physical world — not simply execute preprogrammed motions.