
{kind=link}
{kind=link}
Dynamic walking is one of the most dazzling achievements in robotics. When a machine strides confidently across terrain with mechanical grace, we hardly appreciate the immense mathematical, physical, and control‑systems complexity behind every step. Unlike a wheeled robot whose stability is trivial, a walking robot must constantly balance itself—just like a human—amid shifting forces, sensor noise, and unpredictable surroundings. The question, then, is not just whether a robot can walk, but how researchers quantify and measure that fact of walking without toppling over.
In this article we dive deep into the science of robot stability measurement, the key metrics used in research, how those metrics relate to real locomotion systems, and what this means for the future of humanoid, quadrupedal, and multi‑legged machines.
I. What Does “Stability” Really Mean in Robot Walking?
Before defining quantification, we must clarify stability itself. In everyday language, stability simply means “not falling over.” But in legged robotics, stability is a nuanced, mathematically defined property reflecting how a system responds to disturbances and whether its motion remains bounded over time.
A robot walking dynamically is not static; gravity, inertia, momentum, and ground interaction continuously influence its state. Thus, stability has different meanings:
1. Static vs Dynamic Stability
- Static stability refers to the robot’s center of mass (CoM) staying within its base of support while standing or moving slowly. In such cases, a robot that always keeps the projection of its center of mass inside its support polygon (the area on the ground bounded by its feet) is considered statically stable.
- Dynamic stability arises when robots walk with momentum—often at speeds where static balance is insufficient. Here, the robot’s motion itself contributes to its balance, akin to how a bicycle stays upright only when moving. Dynamic stability is fundamentally about how a robot’s motion evolves over time amid perturbations.
In robotics research, the latter is far more interesting and mathematically complex because it requires predicting how small changes grow or diminish across gait cycles.
II. Key Metrics: How Stability Is Quantified
Researchers use many different stability measures, each corresponding to a different perspective on stability. These include:
1. Zero Moment Point (ZMP)
One of the most widely recognized metrics in legged locomotion research is the Zero Moment Point (ZMP).
In simple terms:
ZMP is the point on the ground where the sum of inertial and gravitational moments is zero.
If the ZMP stays within the robot’s support polygon, the robot should not tip over.
This criterion is particularly intuitive: imagine drawing a polygon connecting the robot’s contact foot points. ZMP tells us whether the interplay of forces keeps the robot’s instantaneous balance within this safe zone.
Pros
- Easy to calculate with joint positions and forces.
- Offers a clear stability margin (distance between ZMP and stability boundaries).
Cons
- Limited in highly dynamic gaits (e.g., running, trotting) where a support polygon doesn’t always exist.
Despite its limitations, ZMP remains pervasive in humanoid robots, including high‑profile machines like Honda’s early humanoids.
2. Margin of Stability (MoS)
Another robust measure is the Margin of Stability, which compares a robot’s extrapolated center of mass (often abbreviated XCoM) relative to base support.
The idea is simple:
Compute the distance between the robot’s current dynamic balance indicator (like extrapolated CoM) and the boundaries of its support region.
A larger margin indicates greater resistance to falling.
This is often used in studies involving robot‑assisted walking, where human motion and robotics intersect, and one needs a bi‑planar stability measure (considering both forward‑backward and sideways motion).
MoS is increasingly used because it quantifies dynamic balance in a way that reflects how humans naturally maintain stability.
3. Orbital Stability and Floquet Multipliers
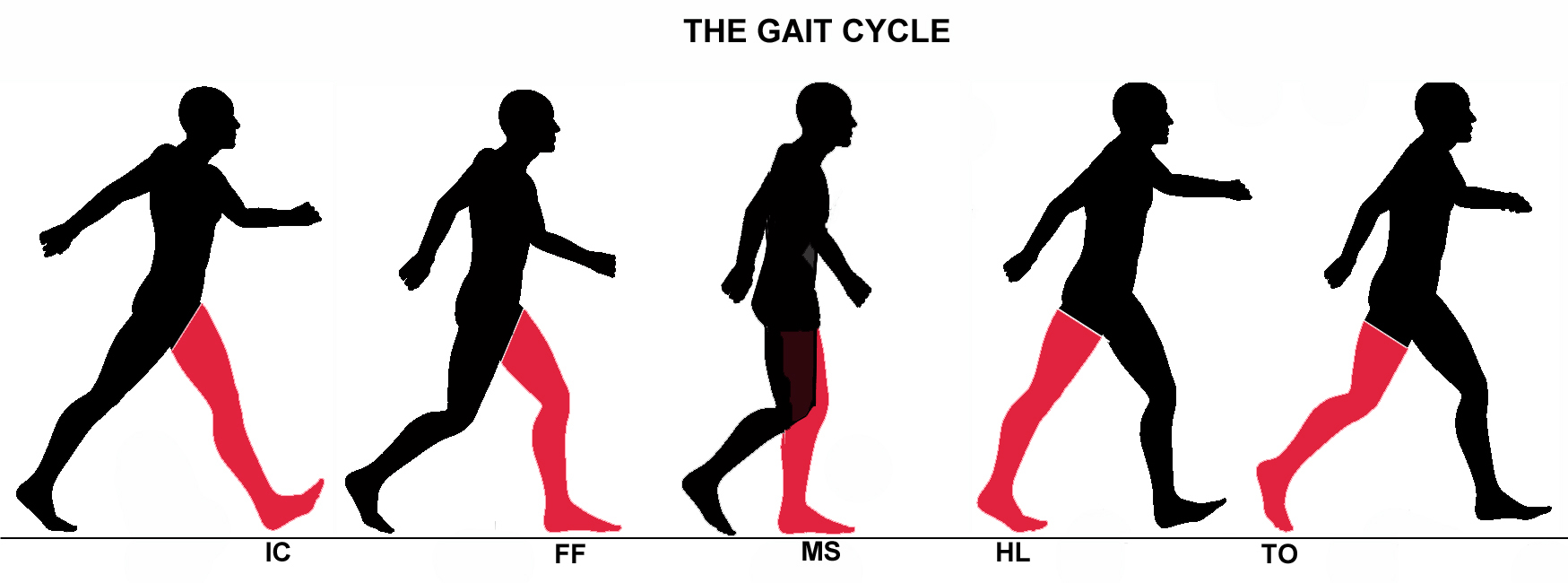
When a robot walks periodically, its gait can be represented as a repeating cycle. Orbital stability asks: If we slightly disturb that cycle, does the system return to its nominal periodic motion?
The key tool here is Floquet multipliers from nonlinear dynamics. They quantify how perturbations evolve from one gait cycle to the next:
- If all multipliers are less than one in magnitude, the cycle is locally orbitally stable (perturbations decay).
- If any exceed one, small disturbances can grow, implying unstable walking.
This technique is rigorous and deeply rooted in dynamical systems theory, making it a gold standard measure of periodic stability.
4. Local Divergence Exponents (Lyapunov Exponents)
Unlike orbital stability which sees full gait cycles, local stability centers on continuous time:
It measures how nearby trajectories in state space diverge as time evolves.
Higher divergence rates imply that small errors can quickly cause tipping or instability. Short‑term local divergence exponents help quantify how resilient the robot is to instantaneous disturbances.
While these exponents are more challenging to compute, they are invaluable for deep dynamical analysis and control design.
5. Energy and Impact‑Based Criteria
Other researchers use energy‑based measures. For example, the Normalized Dynamic Energy Stability Margin (NDESM) quantifies the maximum impact energy the robot can absorb without losing balance.
This is particularly useful in high‑impact tasks, like walking on rough terrain or climbing stairs.
III. Why These Measures Matter: Real‑World Research Insights
Stability criteria are not abstract; they determine the real capabilities of robots. Let’s look at how researchers apply these measures:
1. Predicting Fall Risk in Simulations
In simulated walking models, researchers found that:
- Variability in kinematics (joint angles etc.) increases significantly as surface perturbations increase.
- Short‑term local instability increases as perturbations ramp up.
- However, orbital stability may remain unaffected if the robot does not actually fall.
This illustrates that not all stability measures reflect fall risk equally; some metrics are more sensitive to certain conditions than others.
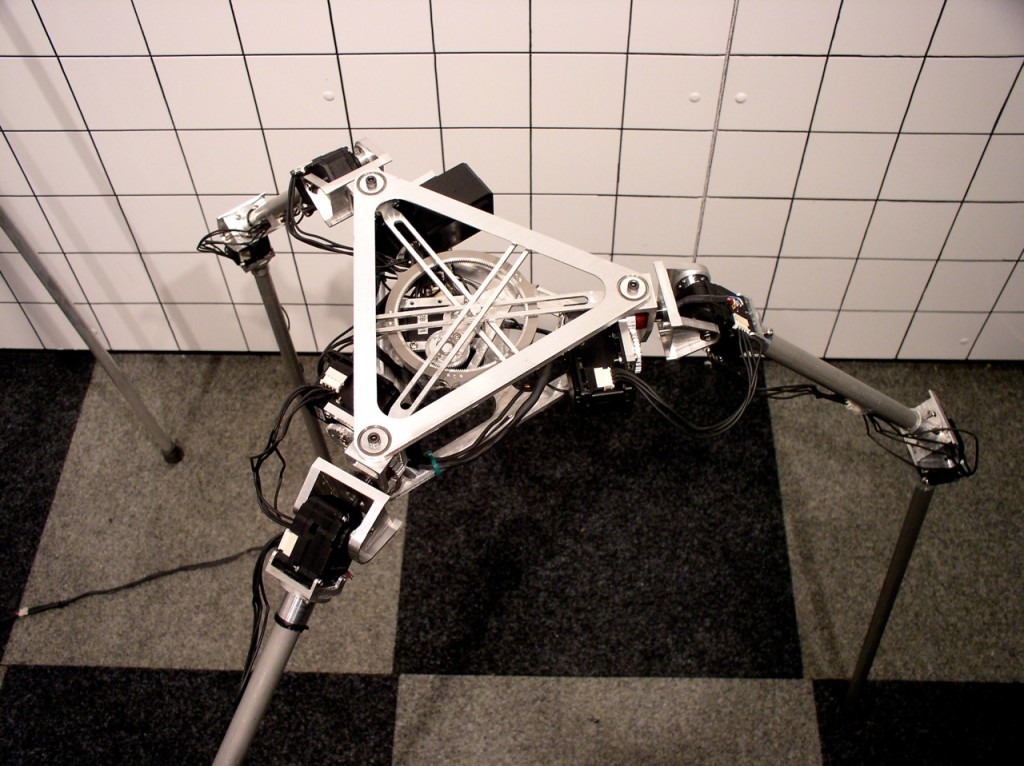
2. Quadruped Gaits and Support Geometry
For four‑legged robots, when gaits reduce support geometry (e.g., only two feet on the ground), traditional stability criteria like ZMP and support polygon checks can break down.
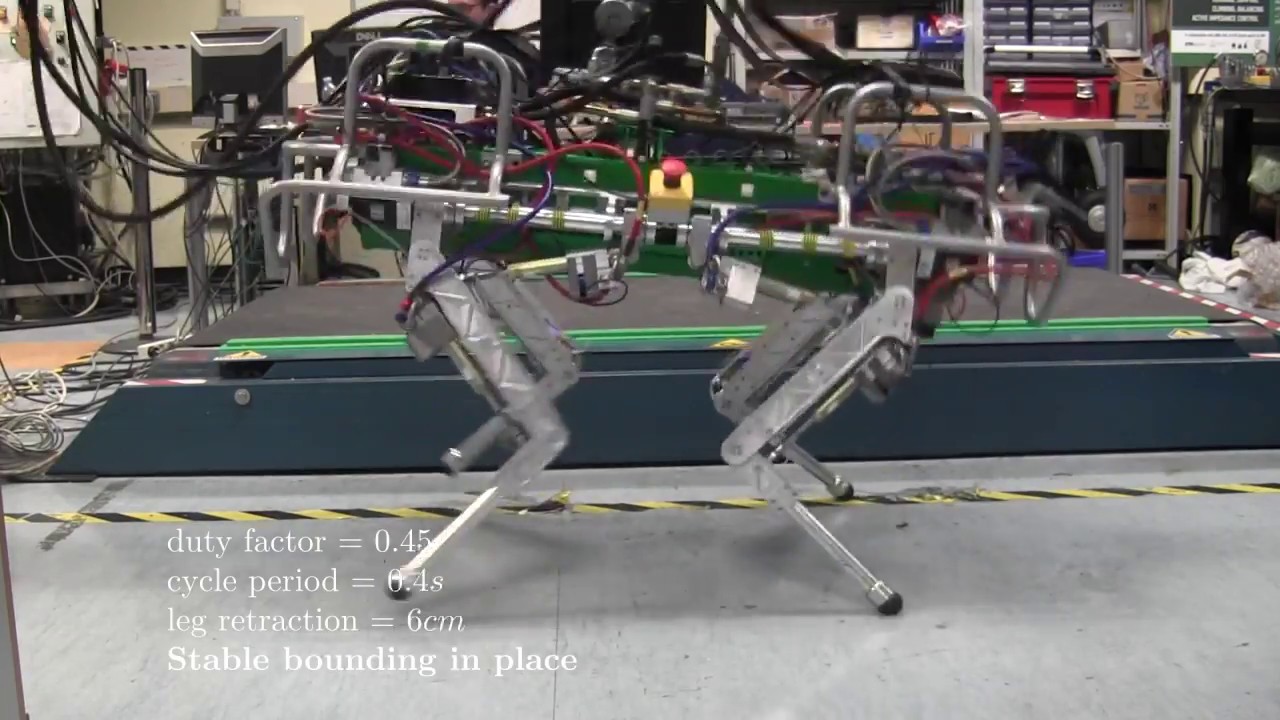
Instead, researchers measure:
- Distance between ZMP and support line.
- Angular momentum about supporting edges.
- Instant gait stability using dynamic models.
Thus quantification often requires context‑specific criteria.
3. Margin of Stability in Robot‑Assisted Walking Research
In comparative gait studies, measures such as CoM relative to base of support and marginal surfaces are key to objectively evaluating how robotic assistive devices influence human balance.
IV. Challenges in Stability Quantification
Even with powerful mathematical tools, researchers face persistent challenges:
1. Hybrid Nature of Robot Locomotion
Legged walking is a hybrid system involving continuous dynamics (legs swinging) and discrete events (foot contact impacts). Stability analysis must handle these abrupt transitions, which complicates prediction. Traditional Lyapunov methods may fail without careful hybrid modeling.
2. Sensor Noise and Real‑World Variability
Robot sensors—like IMUs, force sensors, and joint encoders—are imperfect. Quantifying stability in the real world requires filtering and estimation to remove noise without discarding meaningful dynamics.
3. Terrain Uncertainty
Many measures assume flat ground. On uneven surfaces, support polygons and ZMP suddenly lose meaning. Newer researchers are exploring terrain‑adaptive metrics and machine learning techniques to bridge this gap.
V. The Role of Control in Stability Quantification
Stability measures are closely linked with control strategies. A tight feedback control loop ensures that small deviations from the desired gait are corrected before instability grows. Common controllers include:
- PID and PD controllers tuned to reduce tracking errors state by state.
- Model Predictive Control (MPC) which anticipates future disturbances and adjusts motions proactively.
- Reinforcement learning based controllers which learn stable gait policies through simulation and real‑world trials.
Each method uses stability metrics as objective functions or constraints.
VI. Future Horizons
Stability quantification is advancing rapidly, driven by these frontiers:
1. Learning‑based Stability Metrics
Deep learning may soon derive stability indices directly from sensor data, bypassing hand‑crafted metrics.
2. Human‑Robot Hybrid Gaits
Wearable robots and exoskeletons hinge on human stability models, blending robotic metrics with biomechanics.
3. Multi‑Leg and Morphological Robots
Robots with unconventional morphologies challenge traditional measures like ZMP, demanding novel stability frameworks.
Conclusion
Stability in dynamic robot walking is far more than “don’t fall over.” Researchers quantify it through a suite of mathematical tools and criteria—from ZMP and Margin of Stability to Lyapunov exponents and Floquet multipliers. These metrics fuel control algorithms, guide design decisions, and help translate theoretical robots into machines that can boldly stride into the real world.
Future robotic stability research will continue to bridge human locomotion theory, machine learning, and advanced control systems to create ever more capable and resilient walking machines.