
{kind=link}
{kind=link}
The future of robotics is rapidly evolving, and one of the most exciting frontiers lies in humanoid robots designed to interact with unstructured environments. The challenge? The chaotic, unpredictable nature of the world around us. From scattered objects to varying surfaces, unstructured environments present a significant hurdle for robots programmed in structured, controlled settings. While humanoid robots show great promise, the question remains: Are they truly ready to tackle the complexities of unstructured environment picking challenges?
In this article, we will dive deep into this question, exploring the capabilities and limitations of humanoid robots, the technology that enables them to handle unstructured environments, and the future potential of these robots in real-world applications.
The Rise of Humanoid Robots
Before delving into the intricacies of unstructured environment picking, it’s essential to understand what humanoid robots are and why they are gaining so much attention. Humanoid robots are machines designed to resemble the human form. They typically have two arms, two legs, and a head, mimicking the human body structure. This design allows them to navigate and interact with the environment in a way that is intuitive for humans.
Over the years, advances in robotics have brought humanoid robots closer to becoming functional members of society. These robots have found roles in industries ranging from manufacturing and healthcare to entertainment and service sectors. However, their primary advantage lies in their ability to manipulate objects and navigate spaces in ways that are very similar to humans, which is particularly useful in unstructured environments.
Unstructured Environment Picking: What Does It Mean?
“Unstructured environment picking” refers to the task of selecting and manipulating objects from a disorganized environment. This is vastly different from tasks performed in structured settings, such as assembly lines, where everything is neatly organized and predictable. In unstructured environments, objects might be scattered on a floor, piled on shelves, or even hidden under other objects. The diversity of shapes, sizes, and materials adds another layer of complexity to the challenge.
Humanoid robots tasked with unstructured environment picking must not only recognize and understand the items around them but also possess the dexterity and adaptability to pick them up, manipulate them, and place them where needed. This task requires a combination of vision, grasping ability, motion planning, and real-time decision-making.
The Key Technologies Behind Unstructured Environment Picking
To handle unstructured environment picking challenges, humanoid robots must rely on a range of advanced technologies. Some of the most crucial ones include:
1. Advanced Perception Systems
For humanoid robots to function in unstructured environments, they need robust perception systems. These systems allow robots to “see” their surroundings and understand the objects around them. This is typically achieved using a combination of cameras, sensors, and advanced image recognition algorithms.
Computer vision plays a crucial role here. With the help of deep learning techniques, robots can identify and classify objects in real-time. However, perception systems still face challenges, such as differentiating between similar objects or detecting objects in poor lighting conditions. Despite these hurdles, perception technology has come a long way, and robots are becoming more adept at recognizing objects in cluttered spaces.
2. Grasping and Manipulation
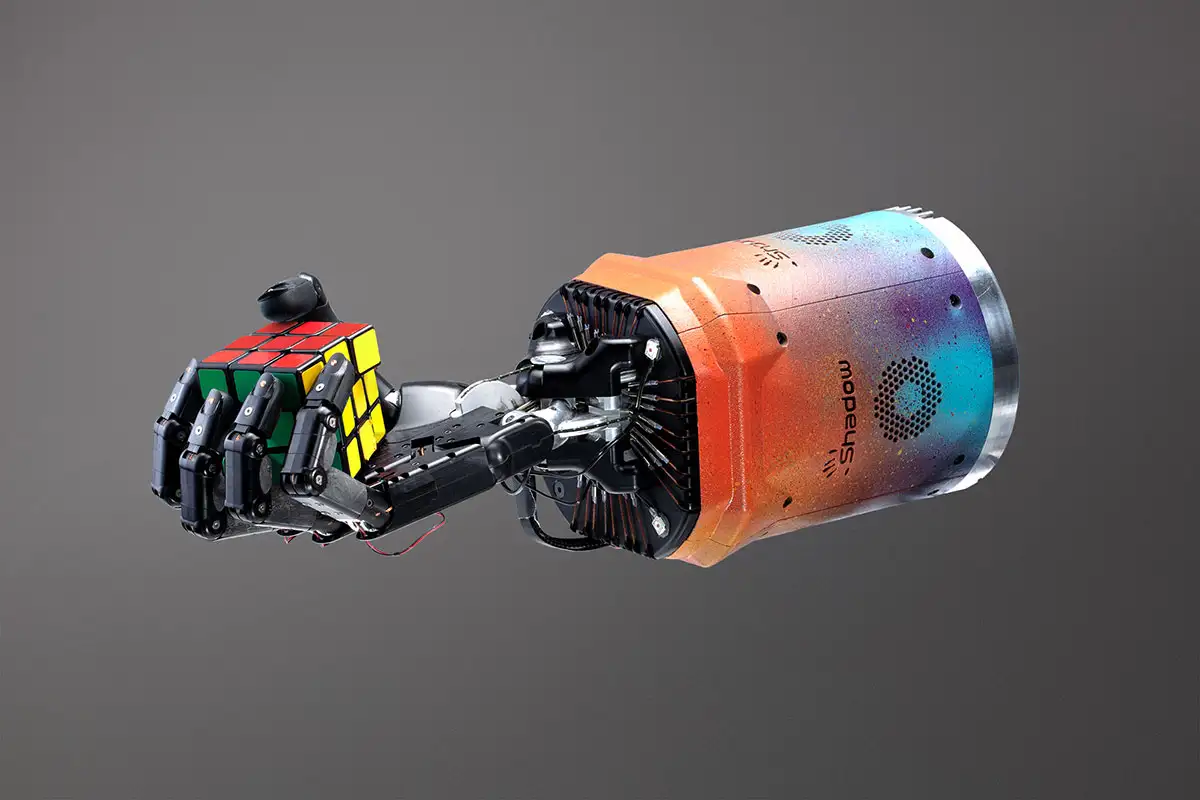
Once a robot has perceived an object, it must be able to grasp it. This is where one of the major challenges of humanoid robots arises: dexterity. Human hands are incredibly versatile and capable of manipulating a vast range of objects. Replicating this dexterity in a robot requires sophisticated grippers, sensors, and algorithms that can adapt to different shapes and materials.
Robots use various types of grippers, ranging from simple two-fingered pinchers to more complex multi-fingered hands. The complexity of the gripper design impacts the robot’s ability to handle delicate objects, exert the correct amount of force, and adjust its grip when encountering resistance. Advances in soft robotics, which incorporate flexible and adaptive materials, are also helping humanoid robots improve their grasping abilities.
3. Motion Planning and Control
Humanoid robots must be able to move efficiently within an unstructured environment. This requires advanced motion planning algorithms that allow robots to navigate obstacles, avoid collisions, and plan their movements in real-time. The challenge is particularly difficult when the environment is dynamic, with constantly changing object positions or unexpected obstacles.
For humanoid robots to pick up objects effectively, they must also possess advanced control systems that allow them to adjust their posture and movements, mimicking the flexibility and adaptability of human movements. Research in artificial intelligence (AI) and machine learning (ML) has made great strides in enabling robots to make these adjustments quickly and accurately.
4. Artificial Intelligence and Machine Learning
AI and ML are central to making humanoid robots effective at unstructured environment picking. These technologies allow robots to learn from their environment, improve their decision-making, and adapt to new challenges.
Through reinforcement learning, robots can learn from their experiences, optimizing their actions based on feedback from their interactions with objects. For example, if a robot tries to pick up an object but fails, it can adjust its strategy and try again, learning from the previous failure. This iterative learning process is essential for overcoming the complexities of unstructured environments.
The Challenges of Unstructured Environment Picking
Despite the impressive advancements in robotics, there are still several challenges that humanoid robots face when it comes to unstructured environment picking:
1. Complexity of the Environment
Unstructured environments are inherently chaotic and unpredictable. Unlike controlled settings, where robots can rely on fixed parameters, unstructured spaces require robots to deal with numerous variables. The size, shape, weight, and material of objects can vary widely, making it difficult for robots to make accurate predictions and perform precise actions.
2. Real-Time Decision Making
Humanoid robots must be capable of making real-time decisions based on their perception of the environment. For example, they may need to choose the best strategy for picking up a cluttered object or determine how to avoid colliding with nearby objects while moving. This requires rapid processing power and highly responsive control systems, which can be difficult to implement in real-world scenarios.

3. Adaptability
In structured environments, robots can follow predefined paths and work with predictable objects. However, in unstructured settings, the robot must adapt to unexpected changes, such as new obstacles or a different arrangement of objects. This adaptability is crucial for humanoid robots to be successful in real-world picking tasks, but it remains a significant challenge.
4. Human-Robot Interaction
While humanoid robots are designed to mimic human behavior, interacting with humans in real-world environments adds another layer of complexity. In scenarios where robots need to work alongside humans, they must ensure safety, communication, and efficiency. Balancing autonomy and human supervision is a delicate task that requires careful consideration of ethics and human factors.
Are Humanoid Robots Ready?
So, are humanoid robots ready for unstructured environment picking challenges? The answer is both yes and no. While significant strides have been made in robotics technology, humanoid robots are still not fully equipped to handle every unstructured environment picking task with the same efficiency and reliability as humans.
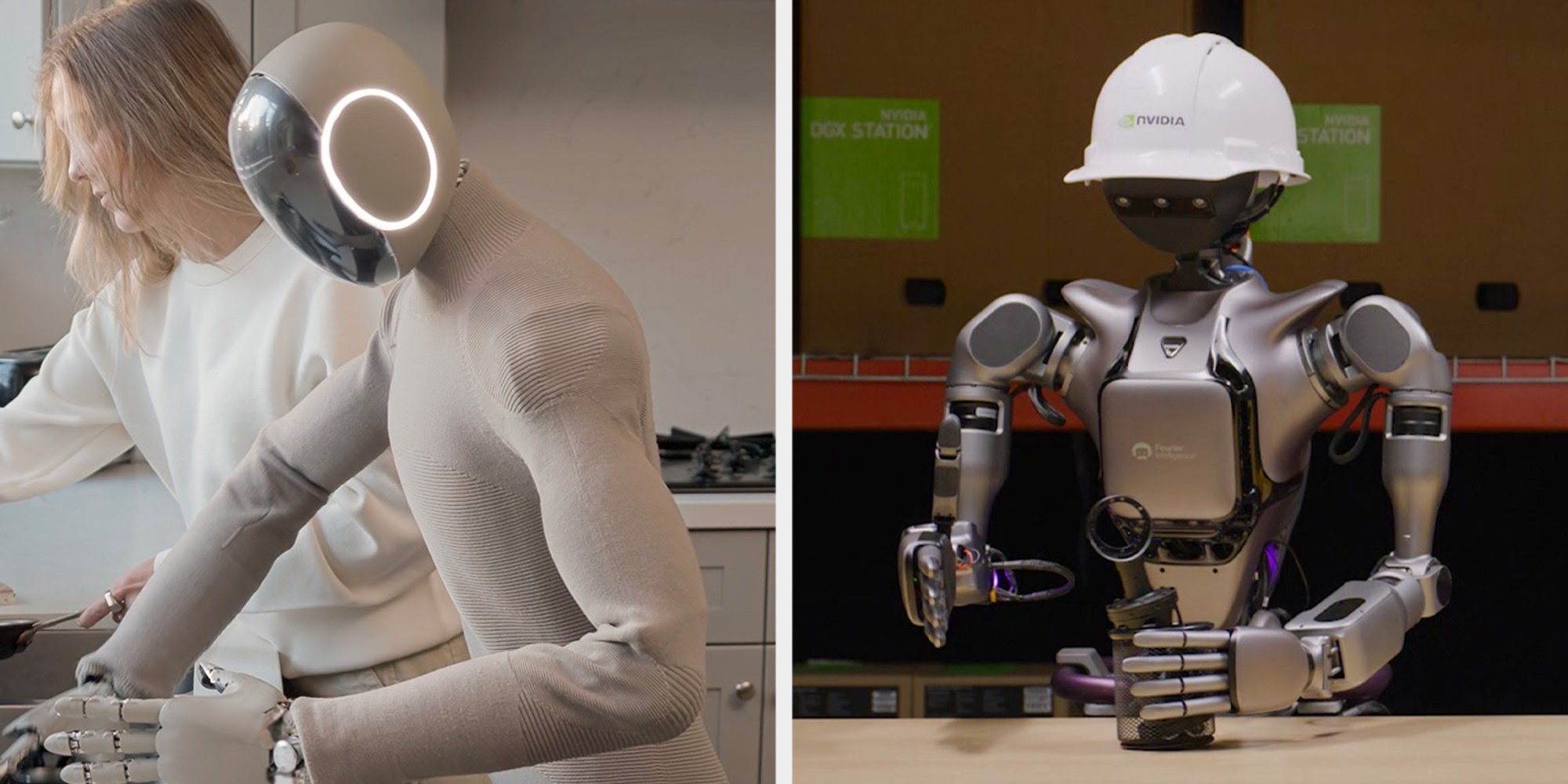
However, the progress made so far is impressive. Humanoid robots have demonstrated success in specific, controlled unstructured environments, such as warehouses or home kitchens, where the task complexity is somewhat limited. Moreover, the integration of AI, improved perception systems, and more advanced manipulation strategies is steadily improving their capabilities.
The Future of Humanoid Robots in Unstructured Environments
The future of humanoid robots lies in their continued development and refinement. As AI and machine learning continue to advance, humanoid robots will become increasingly capable of adapting to new challenges. They will likely become more adept at handling a wider range of objects, navigating more complex environments, and working alongside humans in everyday settings.
In industries like logistics, healthcare, and manufacturing, humanoid robots may one day take over many tasks currently performed by humans. In homes, they could assist with chores, help the elderly, or even provide companionship. The potential applications are vast, and as technology continues to improve, the line between human and robot capabilities will blur even further.
Conclusion
Humanoid robots are undoubtedly making progress toward overcoming the challenges of unstructured environment picking. While there are still significant hurdles to overcome, the combination of advanced perception systems, AI, and robotic dexterity is bringing us closer to a future where humanoid robots can navigate and work in unpredictable environments with ease.
As the technology evolves, we can expect humanoid robots to play an increasingly central role in our lives, taking on more complex tasks and becoming invaluable tools in a variety of industries. Though we may not yet be fully ready to deploy humanoid robots in all unstructured environments, the road ahead looks incredibly promising.